
我们最近在杂志上发表了我在帝国理工学院进行的最后一项工作生物医学工程汇刊.这篇论文叫做术中机器人辅助的大面积高速显微成像及介入,演示了一种用于内镜探针的机器人扫描设备。
任何读过这篇博客的人都知道,内窥镜是一种薄而灵活的显微镜,它可以让我们在不进行活组织检查的情况下获得高分辨率的人体组织图像。小型化的一个缺点是在分辨率和图像大小之间进行相当严重的权衡,导致图像直径通常为半毫米或更小。
在这项工作中,我们使用机器人沿螺旋轨迹扫描一个内窥镜探头。然后,我们实时注册和组合单个图像,形成一个大的马赛克,将有效图像直径增加到3毫米。虽然生成这张更大的图像需要几秒钟的时间,但我们认为这将使内窥镜在肿瘤边缘识别等应用中成为一种更有用的技术,使操作者可以选择可视化更大的组织区域。
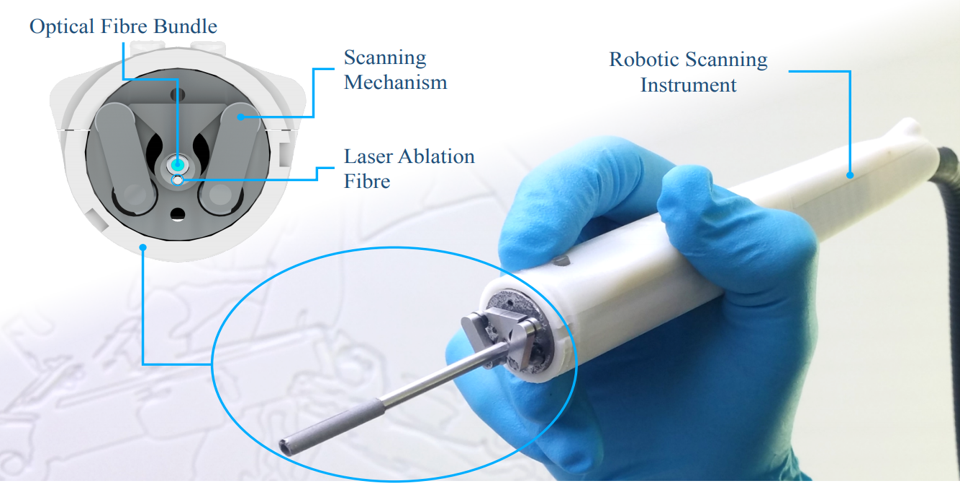
扫描探针本身是由克里斯·佩恩和彼得罗斯·贾塔甘纳斯设计和制造的,他们现在分别去了哈佛大学和触摸外科。它是由自动马达和驱动器结合3d打印和传统加工的塑料和金属部件制成的。我们使用了扫描机器人和我自己开发的高帧率内镜系统(除了探头本身来自市售的Cellvizio系统)。因为我们自己开发了系统所有部分的硬件和软件,这给了我们自由,以确保一切都是定制和优化的,我们想做的事情。
最有趣的结果之一是,我们可以使用来自内窥镜的图像作为机器人控制系统的输入。(事实上,正是这一点让我们有理由称它为机器人)。我们这样做是为了帮助克服机器人扫描内窥镜探针的一个问题,当探针移动时,它倾向于拖拽组织,以一种相当不可预测的方式变形表面。因此,虽然我们可能认为我们正在扫描一个螺旋图案,但所产生的马赛克通常是扭曲的,要么是螺旋环之间的间隙,要么是某些部分过度采样。
为了解决这个问题,我们使用实时马赛克来修正飞行中的扫描轨迹。然后,我们就能确保扫描到的是相对于变形组织的螺旋图案,而不是一些理论上的、预先编程的螺旋图案。当然,所有的修正都必须在高速下进行,记住整个扫描只需要几秒钟就能完成。
我们所拥有的硬件有一些局限性。我们无法纠正突然或剧烈的运动(如病人的呼吸),机器人没有足够的范围,控制系统没有足够高的带宽。这是很好的-该系统只被设计来纠正小的,缓慢的变形,由于扫描内窥镜探头的影响,这一工作它做得很好,至少在体外我们进行了实验。
作为最后一步,我们还将二氧化碳激光消融纤维集成到机器人中。这意味着我们可以用同一种设备对组织进行成像和消融。这两种纤维被抵消了,但我们可以使用机器人快速改变纤维的位置,使我们能够在我们刚刚成像的区域的中心消融。这只是一个初步的演示,但我们认为这是第一次有人展示这样的东西,它将有希望激发进一步的研究,即光学活检系统如何更好地与介入工具集成。